Sustainable Robotics
Our work in sustainable robotics rethinks how robotic systems are designed, powered, deployed, and ultimately disposed of. As robotics increasingly moves into natural, human, and healthcare environments, we ask a fundamental question: *what would it mean for robotic systems to be environmentally responsible, long-lived, and aligned with the ecologies and communities they operate within?*
Drawing from our broader research agenda in sustainable computing, we explore robotic platforms that minimize energy use, eliminate or reduce batteries, and leverage materials and behaviors inspired by living systems. Our goal is to create robotic systems that can operate for long periods of time with minimal maintenance, reduced ecological footprint, and new forms of interaction made possible by sustainability-first design.
Biohybrid and Energy-Seeking Robotics #
Animals have long served as inspiration for robotics, yet many of the mechanical properties, adaptability, and energy-aware behaviors seen in biological systems remain difficult to replicate in conventional robotic platforms. Our work investigates biohybrid robotics—artificial structures combined with living or biologically inspired systems—and control strategies informed by thermoregulation, energy seeking, and environmental coupling.
Rather than treating energy as an external resource to be consumed, we design robotic systems that actively sense, seek, and adapt to available energy in their environment. This perspective enables new classes of robots that are not only more sustainable, but also better suited for long-term deployment in dynamic, real-world settings.
Battery-Free and Sustainable Aerial Robotics #
A core thrust of this work explores battery-free and energy-harvesting unmanned aerial vehicles (UAVs). Conventional drones are constrained by short lifetimes, high maintenance costs, and environmentally costly batteries. In contrast, we investigate flapping-wing and bio-inspired aerial platforms that operate without onboard batteries, instead relying on harvested energy and biologically inspired actuation.
These systems challenge traditional assumptions about robotic autonomy and performance, emphasizing endurance, adaptability, and environmental integration over raw power or speed. Such approaches open new possibilities for sustainable sensing, environmental monitoring, and long-lived robotic infrastructure.
Soft Robotics and Sustainable Materials #
We also explore soft robotic platforms constructed from sustainable and biodegradable materials, motivated by the need to reduce waste and ecological harm from robotic systems deployed at scale. By combining soft materials, novel actuation mechanisms, and sustainability-aware design, we aim to create robots that are safer to interact with, easier to deploy in natural environments, and less damaging when they inevitably fail or are retired.
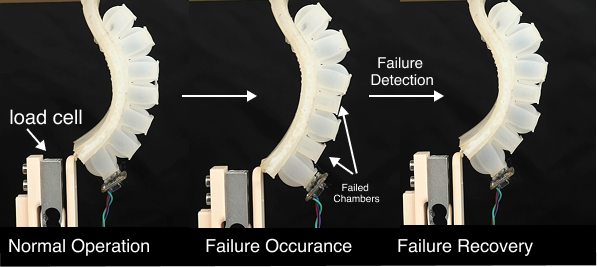
In this research thrust, we develop advanced failure detection and recovery control strategies aimed at extending the operational lifespan of robotic systems, even in the presence of structural failure. Rather than viewing failure as the end of functionality, we design intelligent systems that can detect anomalies in real time, adapt to changing structural conditions, and recover performance autonomously by leveraging built-in design redundancies.
Our work integrates both statistical machine learning and deep learning approaches for robust failure detection. Building on these insights, we develop adaptive recovery control strategies that restore critical capabilities such as robot shape control and tip-force regulation. This framework enables resilient robotic operation, enhancing safety, reliability, and long-term autonomy in complex and unpredictable environments.
This work connects material science, robotics, and sustainability, emphasizing lifecycle-aware design rather than single-metric performance optimization. Multi-university team building actuators for next-generation sustainable bio-bots (Press Release)
Publications #
Battery-Free Flapping-Wing Aerial Robots
Impact: Demonstrates that aerial robotics can operate without batteries, enabling ultra-long-lived, low-maintenance platforms for sustainable sensing and monitoring.
This work introduces a new class of flapping-wing aerial robots that operate without onboard batteries, instead relying on harvested environmental energy. By rethinking autonomy around energy availability rather than continuous power, the paper demonstrates how aerial robotic systems can be designed for extreme longevity and minimal ecological impact. The work challenges conventional UAV assumptions and opens new directions for sustainable aerial sensing and interaction.
Energy-Seeking Behaviors for Biohybrid and Sustainable Robots
Impact: Introduces energy-aware robotic behaviors that improve resilience and sustainability by tightly coupling control to environmental energy availability.
This paper explores control strategies inspired by biological thermoregulation and energy-seeking behavior, enabling robots to adapt their actions based on environmental energy conditions. Rather than treating energy as an external constraint, the system integrates energy awareness directly into robotic behavior, resulting in more resilient, adaptive, and sustainable robotic platforms suitable for long-term deployment.
Biohybrid Actuation for Sustainable Robotic Systems
Impact: Shows how biohybrid actuation can reduce energy and material costs while expanding the design space of sustainable robotic systems.
Published in Scientific Reports, this work presents biohybrid actuation mechanisms that combine engineered structures with biologically inspired or living components. The paper demonstrates how such systems can achieve efficient motion and adaptability while reducing material and energy costs, highlighting biohybrid robotics as a promising pathway toward environmentally responsible robotic design.
Next-Generation Sustainable Bio-Bots
Impact: Establishes scalable, sustainability-aware bio-bot actuators as a foundation for future low-energy robotic platforms.
Appearing in Nature Communications, this work describes the design and fabrication of next-generation biohybrid robotic actuators developed through a multi-institutional collaboration. The paper emphasizes sustainability-aware materials, low-energy operation, and biologically inspired mechanics, positioning bio-bots as a foundation for future robotic systems that are better aligned with natural and human environments.
Soft and Sustainable Robotic Platforms
Impact: Advances soft robotics as a pathway to safer, lower-impact robotic systems with improved lifecycle sustainability.
This paper investigates soft robotic systems built from alternative materials and actuation methods that prioritize safety, sustainability, and lifecycle considerations. By moving away from rigid, power-intensive designs, the work demonstrates how soft robotics can reduce environmental impact while enabling new modes of interaction, particul